
Tilt #1

I want to add a tilt feature. Not because it's needed, but because I like to practice my mojo with a limit. I've got a bunch of tilt mechanisms, but they all need refurbishing, and I've had enough of that for a while; so I says to myself...
Why not build an electronic tilt mechanism?
As usual, this was a stupid idea - not only was it not easy, it was not fun, and it's not even done.
To start with I needed an accelerometer. I selected the ADXL345 chip, on a board often labelled GY-291 (mine isn't).
Here's a picture of it with a JST 8 pin connector attached instead of the usual headers.
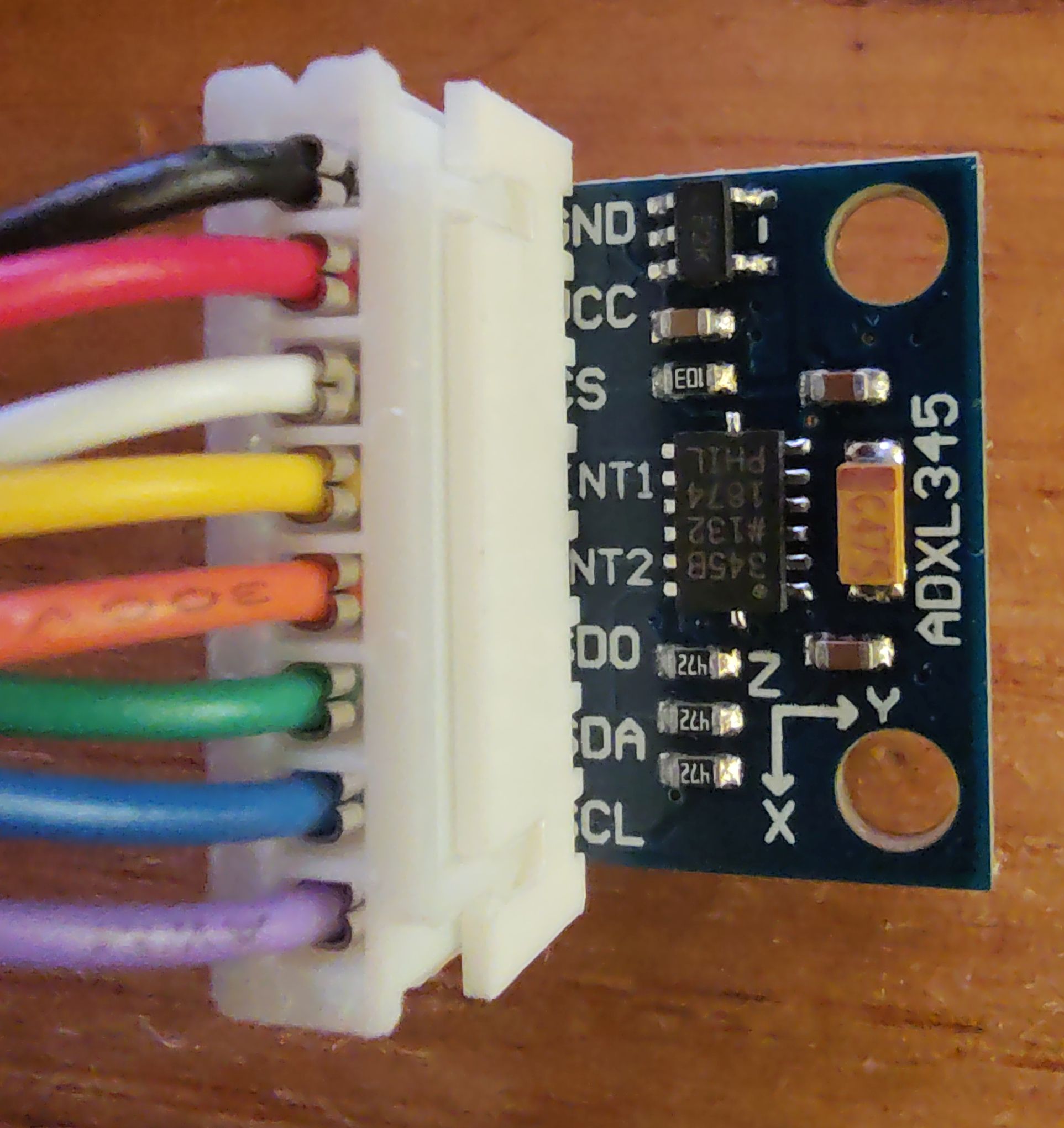
❗ So the first part of the cautionary tale is voltage. Some vendors will advertise 5 volt operation, but that's a little tricky as they often mean 5 volt supply, not 5 volt inputs. Some units have voltage-shifting devices fitted to them so they can work on 3.3 or 5 volts, but most don't. Mine will run from 5 but needs 3.3 inputs (which is pretty common) so I shall use a 3V3 microcontroller to save all that level-changing nonsense.
Moving on, we sort out Chip Select and I2C mode, so we can talk to the chip - not so hard, except it never seemed to work.
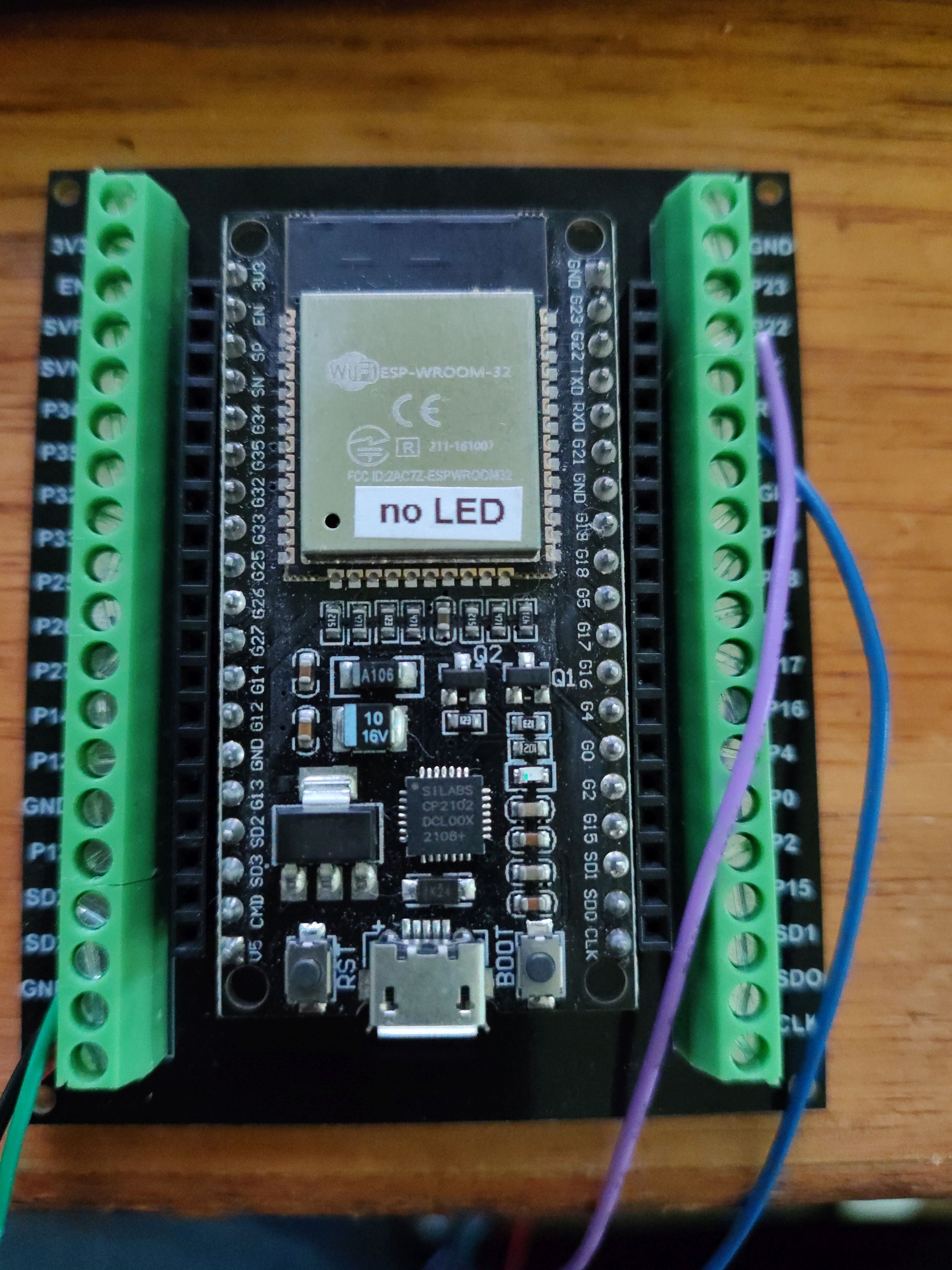
I hooked the accelerometer up to this beast, loaded some popular code, and got errors galore™️ and an occasional something-that-looked-promising. As it happens, the something-that-looked-promisings were just more errors.
I loaded some I2C diagnostic software, and the ESP32 could find the ADXL345 right enough, it just couldn't talk to it. Many hours of fiddling did not help. I went to bed.
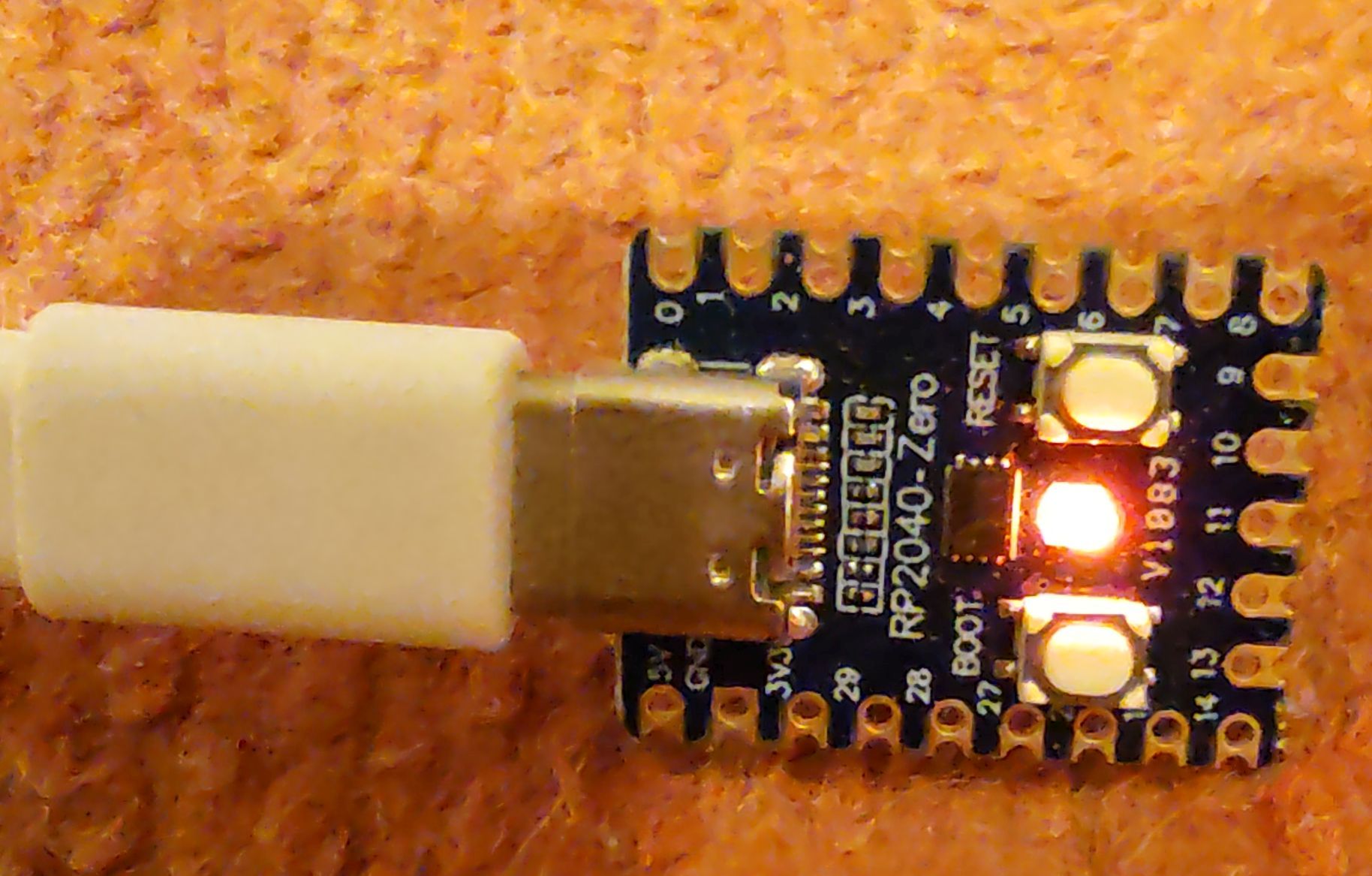
The next day I had a look in my microcontroller box and found that while I had plenty of microcontrollers, I didn't want to solder them up because I'd not be able to reuse them easily. I decided to test a Raspberry Pi 2040 chip on a RP2040-Zero board, even though the software I was using was not tested on it. Why? They are cheap, and small, and fast, and have enough I/O for the job.
❗ So what pins does it use for I2C communication? The doco shows that the chip could use any of 23 pins to do the job. Much searching found a comment in a forum. https://forum.arduino.cc/t/issues-with-i2c-communication-on-waveshare-rp2040-zero/1235882 so I thought I'd give that a go rather than trawling through the library.
A quick wave of the soldering iron and...
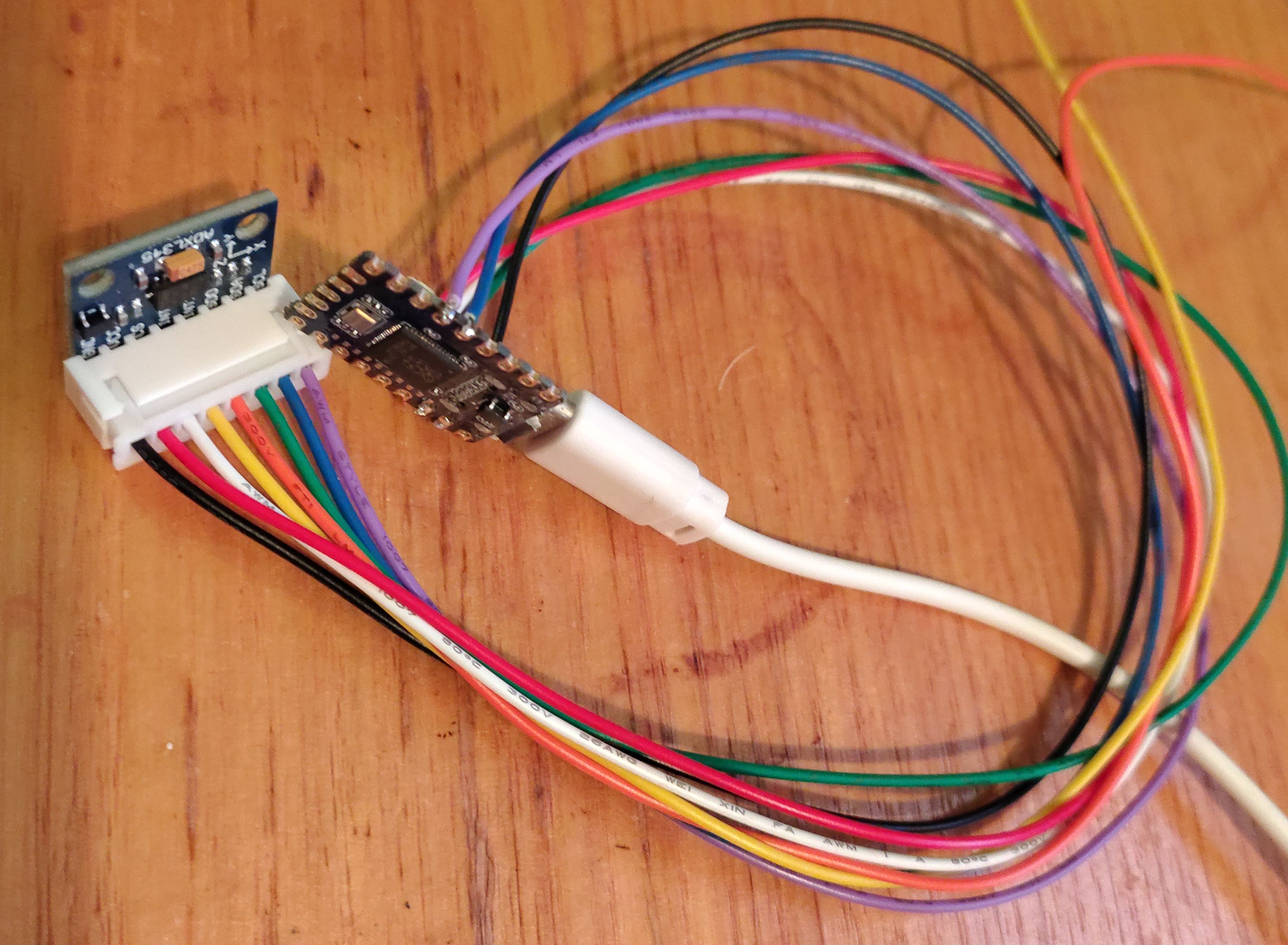
Connections
| JST8 | Colour | ADXL345 | Description of signal/use | RP2040 | 2040 | Location |
|---|---|---|---|---|---|---|
| JST | JST | Board | ADXL345 | Board | Chip | (USB up) |
| 1 | Black | GND | Ground | GND | GND | 2 from top LHS |
| 2 | Red | VCC | Supply Voltage 3-5V | 3V3 | 3V3 | 3 from top LHS |
| 3 | White | CS | Chip Select | 3V3 | 3V3 | 3 from top LHS |
| 4 | Yellow | INT1 | Interrupt 1 Output | nc | ||
| 5 | Orange | INT2 | Interrupt 2 Output | nc | ||
| 6 | Green | SD0 | Serial Data Output (SPI 4-Wire) | - | - | |
| or I2C Address Select | GND | GND | 2 from top LHS | |||
| 7 | Blue | SDA | Serial Data I2C | 4 | GP4 | 5 from top RHS |
| or Serial Data Input (SPI 4-WIRE) | - | - | ||||
| or Serial Data Input and Output (SPI 3-Wire) | - | - | ||||
| 8 | Violet | SCL | Serial Communications Clock | 5 | GP5 | 6 from top RHS |
⭐Tested and worked first time!
❗ Counterfeit electronics from China strikes again! That ESP32 is more like an ESP0.32; probably a marginal chip that was binned, "reclaimed" by an entrepreneur, and sold to me as working. Lot of that going on. I buy lots of microcontrolers from China, including the working RP2040-Zero.
You pays your money and you takes your chances.
What Library to use?
I found these libraries the good old search engine way:
| Library | Contributor | URL |
|---|---|---|
| ADXL345_WE.h | Wolfgang Ewald | wolles-elektronikkiste.de/en/adxl345-the-universal-accelerometer-part-1 |
| github.com/wollewald/ADXL345_WE | ||
| Adafruit_ADXL345_U.h | Adafruit | github.com/adafruit/Adafruit_ADXL345 |
| ADXL345.h | Seeed Studio | www.seeedstudio.com |
| Luis Llamas | Luis Llamas | www.luisllamas.es/en/arduino-adxl345-accelerometer/ |
Examination
I had a gander at them all, poked around the header files, and a look at available doco, and did some actual testing:
| Library | Contributor | Testing | Can Use |
|---|---|---|---|
| ADXL345_WE.h | Wolfgang Ewald | Works, has many examples inc. interrupt code | yes |
| Adafruit_ADXL345_U.h | Adafruit | Works, very abstracted | yes |
| ADXL345.h | Seeed Studio | No data returned | ⚠️no |
| Luis Llamas | Luis Llamas | No data returned | ⚠️no |
⚠️ My testing is not your testing - my modules, chips, libraries all impact on my testing. If it does not work for me, it may still be perfect for you.
Pros and Cons of the two working (for me) libraries
| Library | Pro | Con |
|---|---|---|
| Wolfgang Ewald | Many examples | |
| Interrupt examples | ||
| Closer to hardware | ||
| Not as commonly used | ||
| Adafruit | Abstracted | |
| Common | ||
| Abstracted | ||
| Mysterious | ||
| 1 example |
You might note that Abstracted is a pro and a con. It's great for ease of code, but not for fault-finding.
I decided to go with Ewald Wolfgang's library, and see where that takes me.
Update
@Homepin, and @Railways gave me some great feedback, and I this is my reasoning for not just fitting a standard tilt bob.
- I have some mechanical tilt mechanisms. I don't want to clean up the mechanical tilt mechanisms. Maybe in a year or so I'll be able to face them... I'm all brasso'ed out.
- There's this thing that happens where harmonic motion increases the tilt bob's swing, so that several gentle nudges result in a tilt, I want to eliminate that "feature".
- My old Fish Tales liked to tilt multiple times because the bob-hook did a shimmy, a figure 8 instead of swinging back and forward. I want to remove that "feature" as well.
- It's self-levelling - so I don't need to adjust it if I change the angle of the machine. I don't know if that's actually a thing, but hey, it sounds good.
- It's small and does the job of the bob, the rolling ball-in-a-cage thing (I bet that's got a name), and the slams - so I don't need to fit any of them, although I don't need them, it's nice to have.
- Someone wasn't thinking and mounted something on the playfield that would bump into where the bob should go...
- Price, my <<sophisticates electronics>> is running at $6
If the cabinet had a tilt mech fitted, would I bother - no
If I had a clean and tidy tilt mech would I bother - no
Related posts
Tilt #2
And it works... The onboard LED flashes a different colour for warn, tilt, and slam. Features Feature Achieved Self-levelling Yes Immune to harmonic motion Yes Single trigger per tilt action Yes Time delay between tilt activations Yes Rustproof Yes Provide warning Yes Replace Tilt-bob Yes Replace Lift-tilt Yes Replace Slam-tilt Yes Lift and Slam work in all directions Yes Adjustable…